Your DynaTune is actually a Dyna-Tuna because something is fishy.
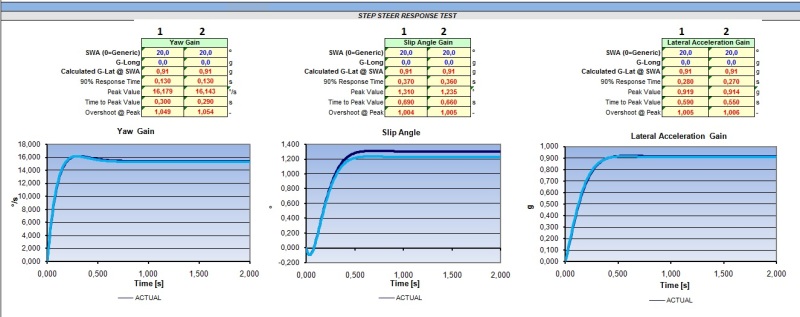
First of all, your 'Yaw Gain' is actually 'Yaw Velocity Response Due to 20 Deg SWA Input at (I'm figuring) 120 kph'. Same for Lateral Acceleration. The 'Gain' terminology would/should be put on the ratio of Output to Input. For this metric, the Gain is about 4.6 g/100 deg (to use an industry standard). This is a rather high number, BTW.
Second, Lateral acceleration for the constant speed conditions you have created consists of a yaw velocity component and a body side-slip component (probably the one labeled 'Slip Angle' and rightly so). Notice that the 'Slip Angle' figure contains a response trait at Time == 0+ due to the thrust of the steered axle. This is the normal signature of the side-slip characteristic. So... Where is this signature in the Lateral Acceleration graph ?? It's missing. That tells me that the software is not presenting true transient response, but is simply the yaw velocity channel multiplied by the set speed . Your 0.91 g (steady State) translates to about 120 kph in this case. The steady state is correct, but everything up to the steady state value is false (as in your response time and overshoot numbers are SNAFU). The 'glitch' (as we call it) in the initial Ay transient is a player in road feel.
Third, I don't know which coordinate system Dyna-Tuna is using, but it indicates a +Steer Angle produced a +Yaw Velocity' (not 'Yaw' as in Yaw Angle) a +Lateral Acceleration (both correct) but a +Side-slip Angle (say it ain't so). My Side-slip Angle transducer would produce a negative steady state value, not a positive one. Besides, my sideslip angle would be positive at low speed, negative at high speed (certainly at 120 kph) with it being ZERO at the so called "Tangent Speed". The goal of producing a high Tangent Speed is usually on everybody's To-Do List. A constant radius ISO4138 Test Procedure can hand this to you.
The middle Figure says that the light blue line Sideslip Angle is lower for the same steer and same speed and that the lateral acceleration achieved is also about the same, so the Gain is the same so the understeer is about the same, meaning the Front and Rear Cornering Compliance DIFFERENCE is still about the same. It looks to me like are merely seeing the effects of stiffer tires ALL AROUND.
Post some car details: Weights, wheelbase, steer ratio, estimated tire properties (at least some cornering stiffness info) maybe some tire aligning moment values and I can demo what you should be expecting. Stick to the steady state analysis with this program. Response times are clearly of high value to a driver, but not ones from this program.
") , here is Step steer result
, here is Step steer result