Hey guys,
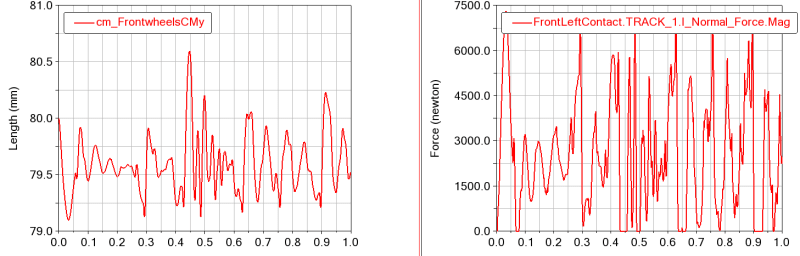
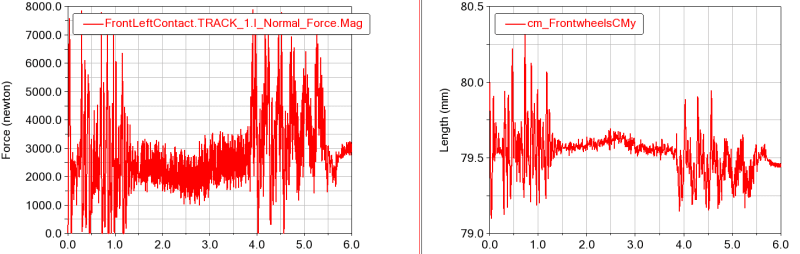
I am simulating a dynamic robot movement on ADAMS 2020 and I want to record normal forces between driving wheels and the ground but I am encountering very high oscillations (shown in attached screenshot) in certain times of the simulation when I enter the post-processor. I tried increasing/decreasing damping coefficient of the contact force and I also checked that the wheel is not bouncing on the ground (y-displacement shown in attached screenshot) but still the high oscillations remained.
Any idea why and how to fix that?
Thanks in advance.
I am simulating a dynamic robot movement on ADAMS 2020 and I want to record normal forces between driving wheels and the ground but I am encountering very high oscillations (shown in attached screenshot) in certain times of the simulation when I enter the post-processor. I tried increasing/decreasing damping coefficient of the contact force and I also checked that the wheel is not bouncing on the ground (y-displacement shown in attached screenshot) but still the high oscillations remained.
Any idea why and how to fix that?
Thanks in advance.