Try setting the friction very low, but not zero. I assume you are using View, have you completed the Latch tutorial? Oh, and can you post the exact error message?
Thank you very much for your response, I was using view,I tried these options:
First, I did the model using the older interface, beacuse my professor is using that one so it makes it easier to follow the class, I did the model, put all the joints, and in the rotation pair of the connecting rod, i put an angular velocity of 600 rad/s, as you can see in the following image:

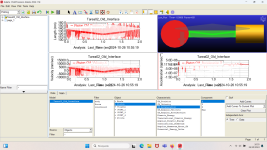
Then, I simulated the mechanism during 2 seconds and with 200 steps, and the results I got in the post proccesor were these:

The speed and acceleration of the piston was falling down overtime, so I thought there has to be friction somewhere, I checked all the joints, and they had a mu static=0.5 and a mu dynamic=0.3, so I changed it to mu static=1e-08 and mu dynamic=1e-09, I simulated again but I got the same results.



After this, I tried to model the mechanism using the new interface, i put the exact same parts and joints, and I simulated the same time with the same steps, but this time the results were different, the speed and acceleration was not falling down during the simulation, maybe the joints work different in the new interface?

When I try to put mu coefficients of 0 in the old interface simulation, this is the error message:

So what I was keep the my static to zero and the mu dynamic I put 1e-09, but the simulation failed and I got this message:

I guess that there has to be an error on the way I put the joints or the intial speed in the old interface? I did not do the latch tutorial I was following what we were doing in class, so I guess I should start using the new interface for now onwards? It's strange because the joints in the new interface also have a mu static and mu dynamic of 0,5 and 0,3 by default.

Again, thank you very much for your response. Sorry for my english btw I have it a bit rusty.