Hello
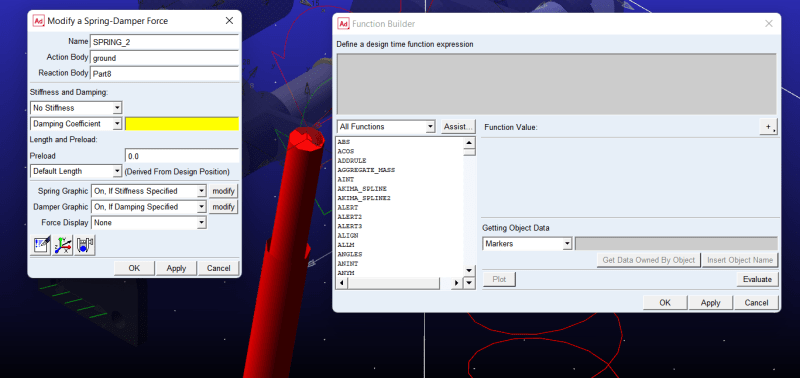
I want to set damping coefficient for special range of deformation of damper , I mean for special range of deformation (A to B) has a special damping coefficient (D1) and for other range has another damping coefficient (D2). How can i do that or which Expression Builder can help ?
Best Regards
I want to set damping coefficient for special range of deformation of damper , I mean for special range of deformation (A to B) has a special damping coefficient (D1) and for other range has another damping coefficient (D2). How can i do that or which Expression Builder can help ?
Best Regards