Saleh abbasi
Mechanical
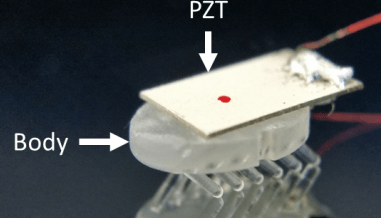
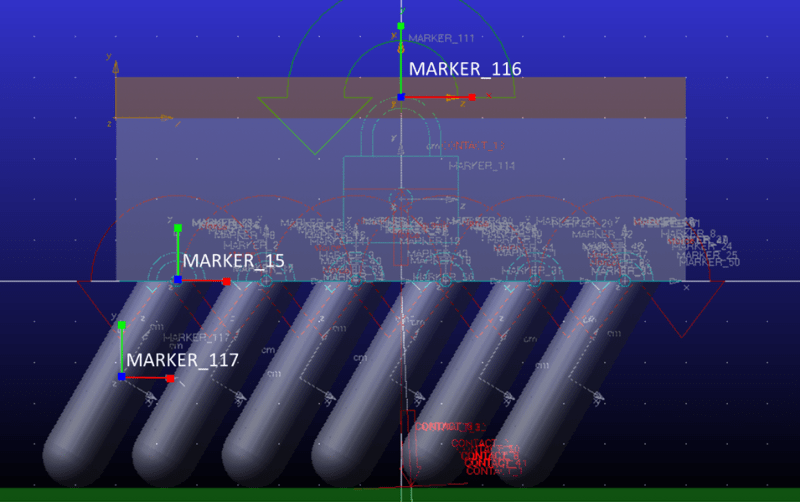
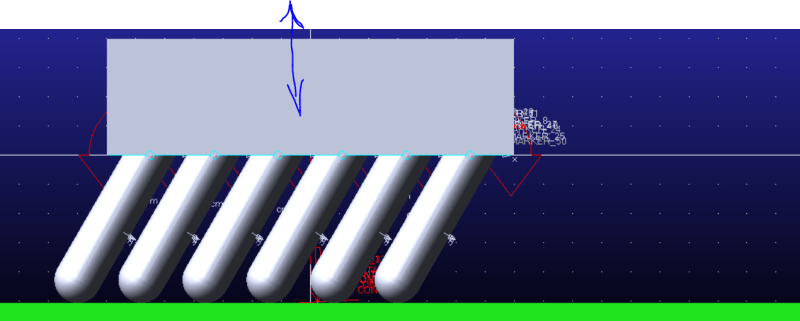
Hello, I have a problem in describe a motion in this body, i want rectangular body have a vibration in direction that I draw. I try to create this with using general motion or planar joint, part can translate in X,Y and rotate in Z, but also must always have this vibration in y direction of body. in general motion we have two markers. reference is in ground and the other is in center of body. I try to write this in motion :
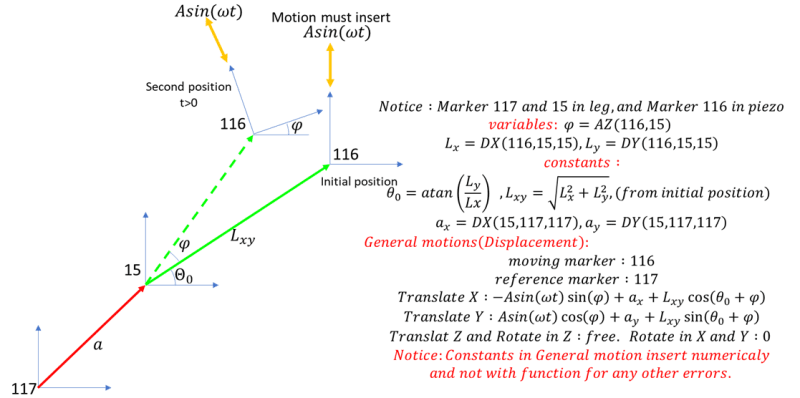
x = displacement : A*sin(w*time)*sin(AZ(part_marker,ground_marker))+ DX(part_marker,ground_marker,ground_marker)
y = displacement : A*sin(w*time)*cos(AZ(part_marker,ground_marker))+ DY(part_marker,ground_marker,ground_marker)
the body can rotate in Z axes and for vibration Vector perpendicular to body I decomposition with AZ() function (Z angle).
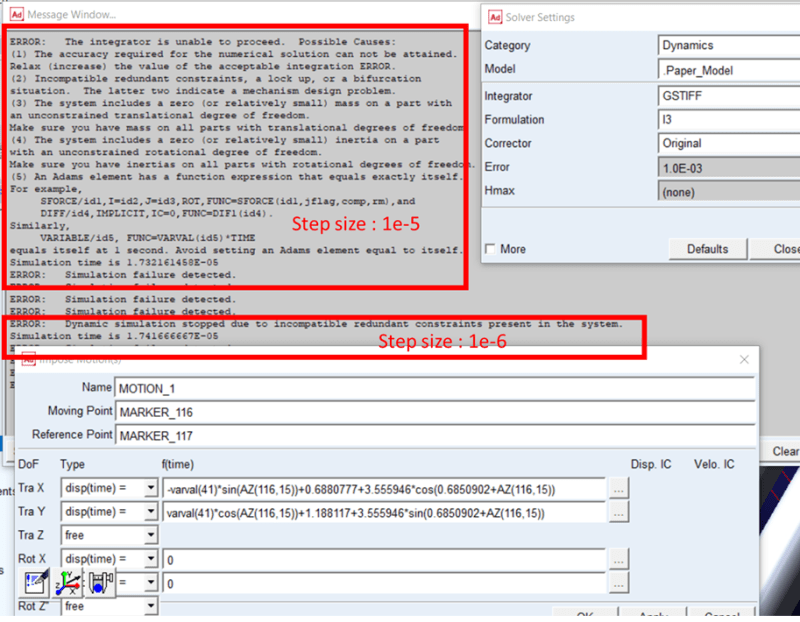
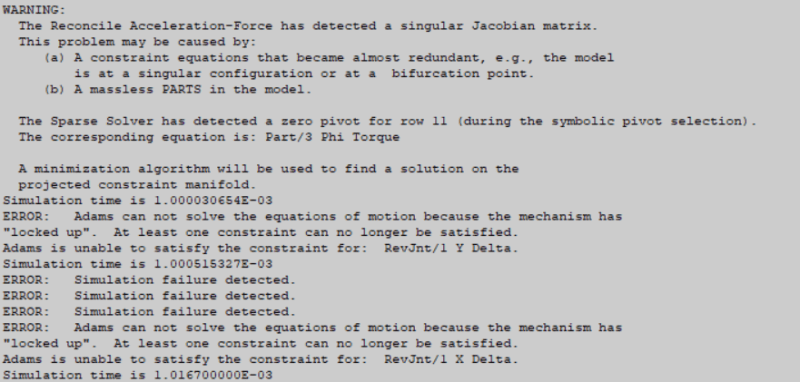
I used DX and DY for free translation motion in these directions, but i got this error in simulation :
A probable cause is an over-specification of initial velocities of bodies.
Please specify fewer initial velocities and try again
ERROR: Simulation failure detected.
x = displacement : A*sin(w*time)*sin(AZ(part_marker,ground_marker))+ DX(part_marker,ground_marker,ground_marker)
y = displacement : A*sin(w*time)*cos(AZ(part_marker,ground_marker))+ DY(part_marker,ground_marker,ground_marker)
the body can rotate in Z axes and for vibration Vector perpendicular to body I decomposition with AZ() function (Z angle).
I used DX and DY for free translation motion in these directions, but i got this error in simulation :
A probable cause is an over-specification of initial velocities of bodies.
Please specify fewer initial velocities and try again
ERROR: Simulation failure detected.