from __future__ import division
import math as m
import scipy.optimize as sci
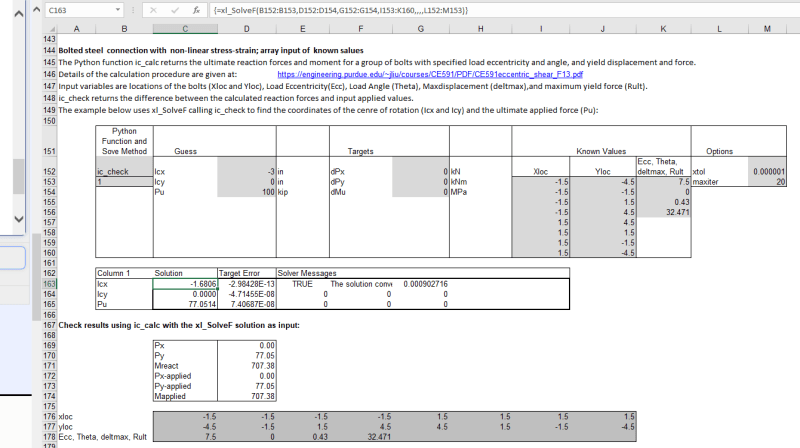
def ic_check(IC,xloc,yloc, ecc, theta):
num_bolts = len(xloc)
deltamax = 0.34
Rult = 32.471
ICx = IC[0]
ICy = IC[1]
xIC = []
yIC = []
di = []
deltai = []
ri = []
fx = []
fy = []
moment = []
for x in xloc:
xICtemp = x - ICx
xIC.append(xICtemp)
for y in yloc:
yICtemp = y - ICy
yIC.append(yICtemp)
i=0
for i in range(num_bolts):
ditemp = m.sqrt((xIC[i]*xIC[i])+(yIC[i]*yIC[i]))
di.append(ditemp)
dmax = max(di)
i=0
for i in range(num_bolts):
deltaitemp = (di[i]/dmax)*deltamax
deltai.append(deltaitemp)
i=0
for i in range(num_bolts):
ritemp = Rult*m.pow(1-m.pow(m.e,-10.0*deltai[i]),0.55)
ri.append(ritemp)
i=0
for i in range(num_bolts):
fxtemp = (yIC[i]*ri[i])/di[i]
fx.append(fxtemp)
i=0
for i in range(num_bolts):
fytemp = (xIC[i]*ri[i])/di[i]
fy.append(fytemp)
i=0
for i in range(num_bolts):
momenttemp = ri[i]*di[i]
moment.append(momenttemp)
totX = sum(fx)*0.75
totY = sum(fy)*0.75
totM = sum(moment)*0.75
Pu_force = m.sqrt((totX*totX) + (totY*totY))
Pu_moment = totM / (ecc - ICx*m.cos(m.radians(theta)) - ICy*m.sin(m.radians(theta)))
res1 = [totX, totY, totM]
res2 = [Pu_force, Pu_moment]
check_output = [xIC,yIC,di,deltai,ri,fx,fy]
return res1, res2, check_output
def ic_optimize(IC,xloc,yloc,ecc,theta):
res1, res2, check = ic_check(IC,xloc,yloc,ecc,theta)
res = res2[0] - res2[1]
px = res2[0]*m.sin(m.radians(theta))
py = res2[0]*m.cos(m.radians(theta))
fx = px - res1[0]
fy = py - res1[1]
res_magnitude = m.sqrt(res*res+fx*fx+fy*fy)
return res_magnitude
def ic_brandt(IC, xloc, yloc, Mp):
num_bolts = len(xloc)
deltamax = 0.34
ICx = IC[0]
ICy = IC[1]
xIC = []
yIC = []
di = []
deltai = []
ri = []
fx = []
fy = []
moment = []
for x in xloc:
xICtemp = x - ICx
xIC.append(xICtemp)
for y in yloc:
yICtemp = y - ICy
yIC.append(yICtemp)
i=0
for i in range(num_bolts):
ditemp = m.sqrt((xIC[i]*xIC[i])+(yIC[i]*yIC[i]))
di.append(ditemp)
dmax = max(di)
i=0
for i in range(num_bolts):
deltaitemp = (di[i]/dmax)*deltamax
deltai.append(deltaitemp)
i=0
for i in range(num_bolts):
ritemp = m.pow(1-m.pow(m.e,-10.0*deltai[i]),0.55)
ri.append(ritemp)
i=0
for i in range(num_bolts):
fxtemp = -1*(yIC[i]*ri[i])/di[i]
fx.append(fxtemp)
i=0
for i in range(num_bolts):
fytemp = (xIC[i]*ri[i])/di[i]
fy.append(fytemp)
i=0
for i in range(num_bolts):
momenttemp = ri[i]*di[i]
moment.append(momenttemp)
Mi = sum(moment)
Rult = -1*Mp/Mi
Rx = sum(fx) * Rult
Ry = sum(fy) * Rult
table = [xIC, yIC, di, deltai, ri, moment, fx, fy]
return Rx, Ry, Mi, table
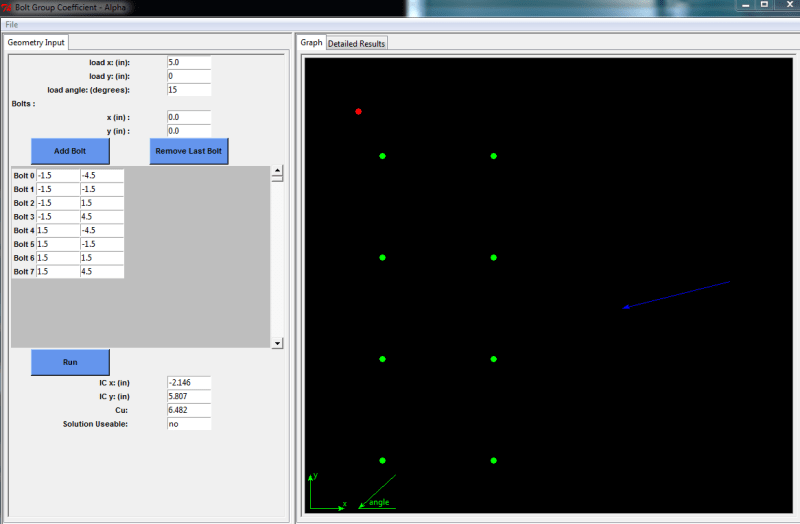
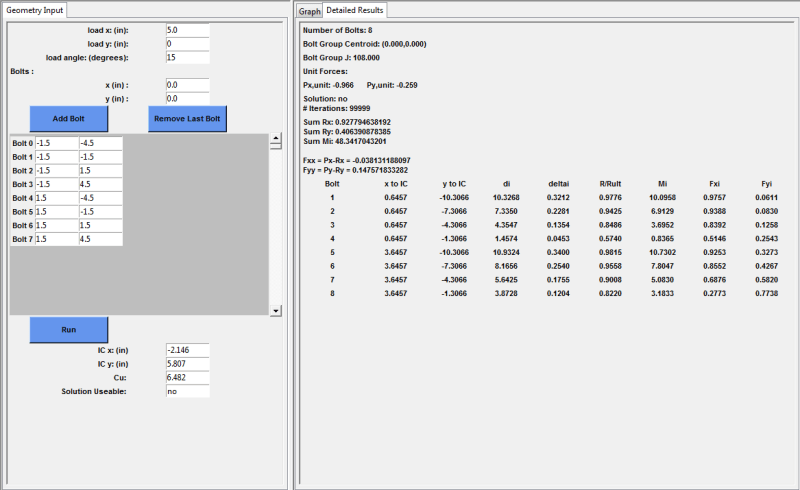
def brandt(xloc, yloc, P_xloc, P_yloc, P_angle):
# Bolt Group Instantaneous Center using method by G. Donald Brandt
# Rapid Determiniation of Ultimate Strength Of Eccentrically Loaded Bolt Groups
# AISC Journal 1982 2nd Quarter
detailed_output = []
num_bolts = len(xloc)
n = num_bolts
detailed_output.append(num_bolts)
#Bolt Group Centroid
if len(xloc)<3:
anchor_x_bar = (xloc[0]+xloc[1])/2.00
anchor_y_bar = (yloc[0]+yloc[1])/2.00
else:
j=0
x_tot=0
y_tot=0
for i in xloc:
x_tot = x_tot+xloc[j]
y_tot = y_tot+yloc[j]
j+=1
anchor_x_bar = x_tot/len(xloc)
anchor_y_bar = y_tot/len(yloc)
cg_anchors = [anchor_x_bar, anchor_y_bar]
detailed_output.append(cg_anchors)
# J - Polar Moment of Inertial of Bolt Group
# sum(x^2+y^2)
sum_x_square = 0
sum_y_square = 0
i=0
for i in range(num_bolts):
sum_x_square = sum_x_square + (xloc[i]-anchor_x_bar)**2
sum_y_square = sum_y_square + (yloc[i]-anchor_y_bar)**2
J = sum_x_square + sum_y_square
detailed_output.append(['J',J])
Px = -1*m.cos(m.radians(P_angle))
Py = -1*m.sin(m.radians(P_angle))
detailed_output.append([Px,Py])
Mo = (-1*Px*(P_yloc-anchor_y_bar))+(Py*(P_xloc-anchor_x_bar))
detailed_output.append(Mo)
ax = (-1*Py*J) / (n * Mo)
ay = (Px*J) / (n*Mo)
detailed_output.append([ax,ay])
Mp = (-1*Px*(P_yloc-anchor_y_bar-ay))+(Py*(P_xloc-anchor_x_bar-ax))
detailed_output.append(Mp)
IC_initial = [anchor_x_bar+ax,anchor_y_bar+ay]
Rx, Ry, Mi, table = ic_brandt(IC_initial,xloc,yloc, Mp)
detailed_output.append([Rx, Ry, Mi, table,"First IC pass"])
fxx = Px + Rx
fyy = Py + Ry
F = m.sqrt(fxx*fxx+fyy*fyy)
detailed_output.append([fxx,fyy,F,"F"])
ax_new = (-1*fyy*J)/(n*Mo)
ay_new = (fxx*J) / (n*Mo)
detailed_output.append(["ax",ax_new,"ay",ay_new])
IC_new = IC_initial
count = 0
iterations = 0
while count<1000:
IC_new = [IC_new[0]+ax_new,IC_new[1]+ay_new]
Mp_new = (-1*Px*(P_yloc-IC_new[1]))+(Py*(P_xloc-IC_new[0]))
Rx, Ry, Mi, table = ic_brandt(IC_new,xloc,yloc, Mp_new)
fxx = Px + Rx
fyy = Py + Ry
F = m.sqrt(fxx*fxx+fyy*fyy)
ax_new = (-1*fyy*J)/(n*Mo)
ay_new = (fxx*J) / (n*Mo)
if F <= 0.00001:
iterations = count
count = 1000
solution = 'yes'
else:
count +=1
solution = 'no'
detailed_output.append([fxx,fyy,F])
detailed_output.append(IC_new)
detailed_output.append([solution,iterations,count])
detailed_output.append([Rx, Ry, Mi, table])
Cu = abs(Mi/Mp_new)
detailed_output.append([Mi,Mp_new,Cu])
return detailed_output, IC_new, Cu
# From Scratch Method Testing Zone
xloc = [-1.5,-1.5,-1.5,-1.5,1.5,1.5,1.5,1.5]
yloc = [-4.5,-1.5,1.5,4.5,4.5,1.5,-1.5,-4.5]
#Center of Anchor Group
if len(xloc)<3:
anchor_x_bar = (xloc[0]+xloc[1])/2.00
anchor_y_bar = (yloc[0]+yloc[1])/2.00
else:
j=0
x_tot=0
y_tot=0
for i in xloc:
x_tot = x_tot+xloc[j]
y_tot = y_tot+yloc[j]
j+=1
anchor_x_bar = x_tot/len(xloc)
anchor_y_bar = y_tot/len(yloc)
ICx = anchor_x_bar
ICy = anchor_y_bar
IC = [ICx,ICy]
theta = 0
ecc = 4
res1, res2, check1 = ic_check(IC,xloc,yloc,ecc,theta)
test2 = ic_optimize(IC,xloc,yloc,ecc,theta)
test = sci.minimize(ic_optimize,IC,(xloc,yloc,ecc,theta),method='Nelder-Mead', tol=1e-6)
IC_new = [test.x[0],test.x[1]]
res3, res4, check2 = ic_check(IC_new,xloc,yloc,ecc,theta)
C = res4[0]/(0.75*32.471)
# Brandt's Method Testing Zone
# angle is positive counter-clockwise and measured from 0 pointing to the right
# anchor and P coordinates are global
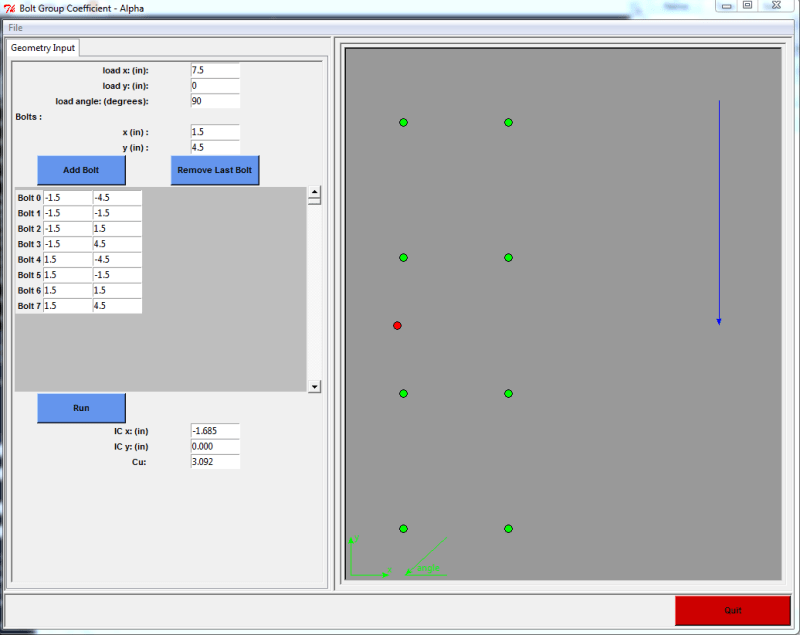
x_b = [-1.5,-1.5,-1.5,-1.5,1.5,1.5,1.5,1.5]
y_b = [-4.5,-1.5,1.5,4.5,4.5,1.5,-1.5,-4.5]
P_xloc = 7
P_yloc = 0
P_angle = 90
brandt = brandt(x_b, y_b, P_xloc, P_yloc, P_angle)

![[spin2]](/data/assets/smilies/spin2.gif "[spin2] [spin2]") , lots of learning to ensue...
, lots of learning to ensue...