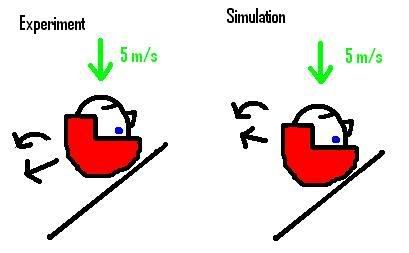
I am performing helmet testing where a helmeted head form is being dropped on an inclined plate. The head form contains 9 accelerometers so that the rotational acceleration can be measured.
The results from the experimental tests are to be used to validate the FEA model I am working with.
The problem I’m having is that the results from the simulations do not match those from the experimental tests. This is apparent when comparing the rotational accelerations from the experiments with those from the simulations. The rotational curve obtained from the experiments stretch over a larger time interval.
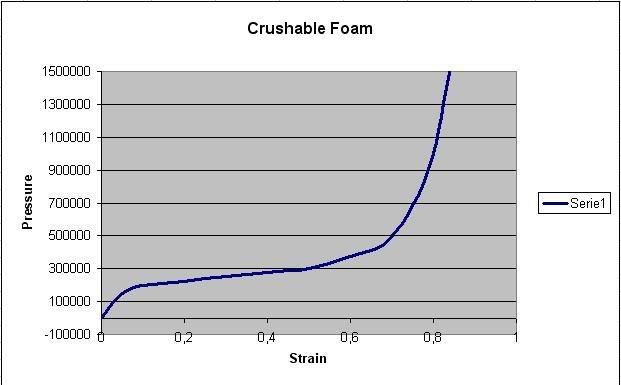
The FEA model consists of the head which is modeled as a rigid interior surrounded by a viscoelastic “rubber-like” material. The helmet is made of a 3cm thick liner of crushable foam and a 0.47cm thin outer shell defined as elastic.
I have performed a parametric study altering the liner density, shell stiffness, friction between helmet and plate. Altering these doesn’t seem to help.
Have I missed something here?
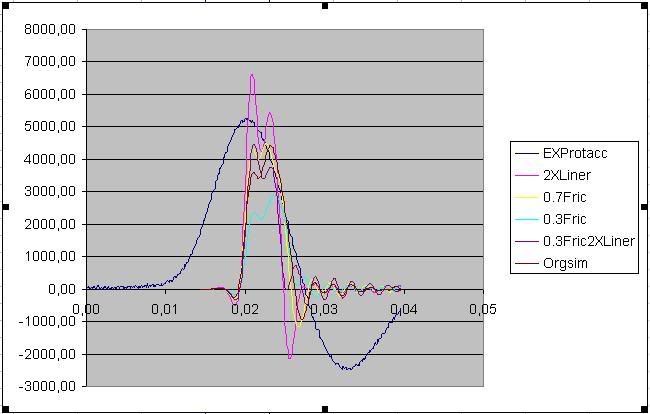
Y-axis is rotational acceleration (rad/sec^2), X-axis is Time (sec).
EXProtacc= The results from the experimental tests
2Xliner= two times stiffer than the original simulation
0.7Fric= 0.7 friction coefficiant between helmet and plate
0.3Fric= 0.3 friction coefficiant between helmet and plate
0.3Fric2XLiner= 0.3 fric coef between plate and helmet and 2 times the density of the liner
Orgsim= The original unaltered simulation
The results from the experimental tests are to be used to validate the FEA model I am working with.
The problem I’m having is that the results from the simulations do not match those from the experimental tests. This is apparent when comparing the rotational accelerations from the experiments with those from the simulations. The rotational curve obtained from the experiments stretch over a larger time interval.
The FEA model consists of the head which is modeled as a rigid interior surrounded by a viscoelastic “rubber-like” material. The helmet is made of a 3cm thick liner of crushable foam and a 0.47cm thin outer shell defined as elastic.
I have performed a parametric study altering the liner density, shell stiffness, friction between helmet and plate. Altering these doesn’t seem to help.
Have I missed something here?
Y-axis is rotational acceleration (rad/sec^2), X-axis is Time (sec).
EXProtacc= The results from the experimental tests
2Xliner= two times stiffer than the original simulation
0.7Fric= 0.7 friction coefficiant between helmet and plate
0.3Fric= 0.3 friction coefficiant between helmet and plate
0.3Fric2XLiner= 0.3 fric coef between plate and helmet and 2 times the density of the liner
Orgsim= The original unaltered simulation
 lease see FAQ731-376 for tips on how to make the best use of Eng-Tips.
lease see FAQ731-376 for tips on how to make the best use of Eng-Tips.