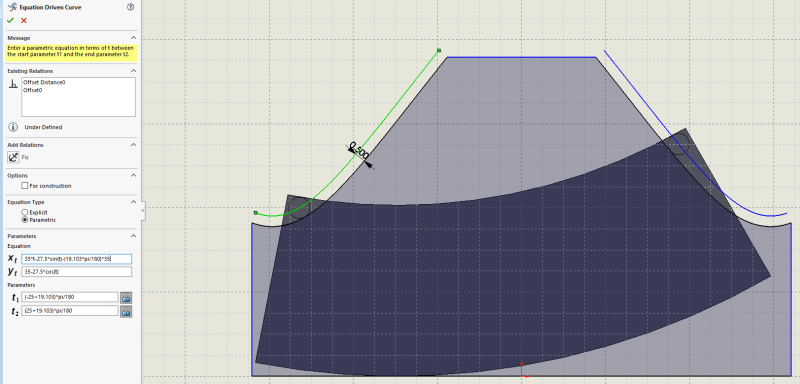
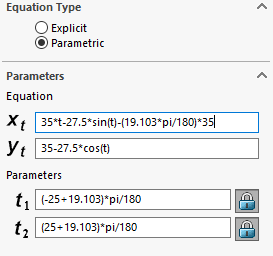
19.103 degrees is the angle from vertical to your cam follower in the plate you posted. The first part of the equation is straight from Wikipedia, but it starts from a rotation angle of zero degrees. When your plate is vertical, the lagging follower has already "rotated" through 19.103 degrees. Therefore, you need to offset the X axis backward by the "rolling" distance, which is radians times radius. Radians is degrees times pi divided by 180. Of course, your "leading" follower must be offset in the other direction
t1 and t2 are just the 20 degree rotation amount you specified, plus an extra 5 degrees for safety margin, and offset to account for the fact that it has already "rotated" through 19.103 degrees.
Note that the equation driven curve is the centerline of the follower. You then have to offset that curve by follower radius. Do not try to directly draw the path of the follower surface. It won't be right.