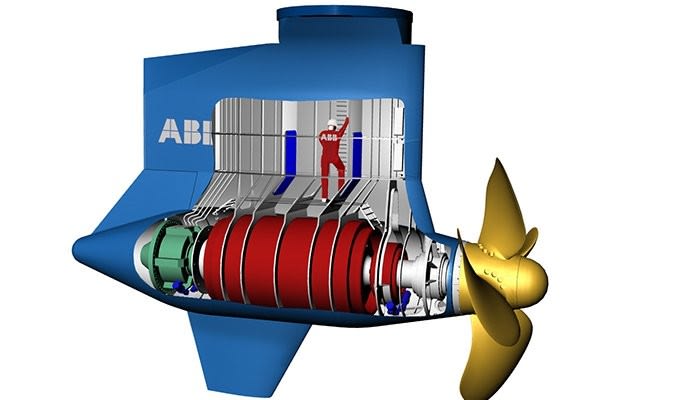
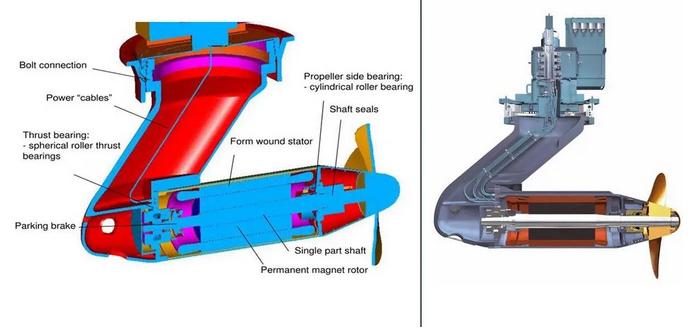
Azipods come in two basic configurations. Type "A" has the motor external to the pod, with a complicated gear train running from the motor (in the hull) to the prop (at the end of the pod), which eliminated the whole "humidity in the pod" discussion. Type "B" has the motor mounted within the pod nacelle, with a more-or-less direct drive to the prop. Here, the electrical connections have to come from within the hull through the connecting assembly to the motor.
In both cases, the motor is (likely) going to be a totally-enclosed construction - typically with a water-to-air cooler assembly. In this construction the primary coolant is air, which is kept internal to the motor and is never exchanged with the surroundings. The secondary coolant is some form of liquid (water-glycol solution, sea water, or "pure" water), which may be a once-through design (typical of sea water) or a recirculating design (glycol or "pure" water loop).
Motors are - generally - manufactured with anti-condensation heaters installed within the motor frame. These heaters are never powered when the motor is in operation, as current through the windings is sufficient to keep everything above the dew point. Their only use is when the system is shut down or idled.
Converting energy to motion for more than half a century