sticksandtriangles
Structural
I am on the hunt for mapping algorithms to link structural engineering software beams and columns to revit beams and columns.
The problem:
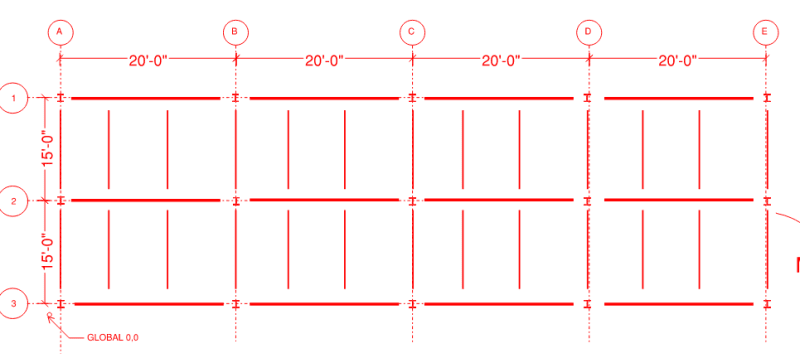
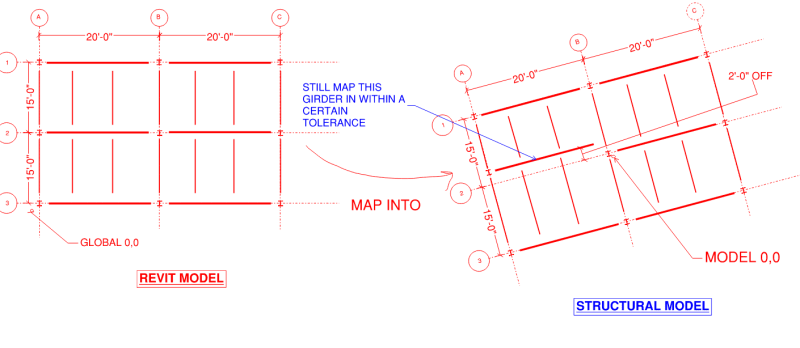
Often our revit models and engineering models are located at differing points in global space and maybe even rotated. I want to be to map the two models together with some form of a tolerance.
See image below:
I have written some sloppy code previously to tackle this problem, but it requires manual input for mapping the global coordinates between the two programs and could not handle a rotation type parameter.
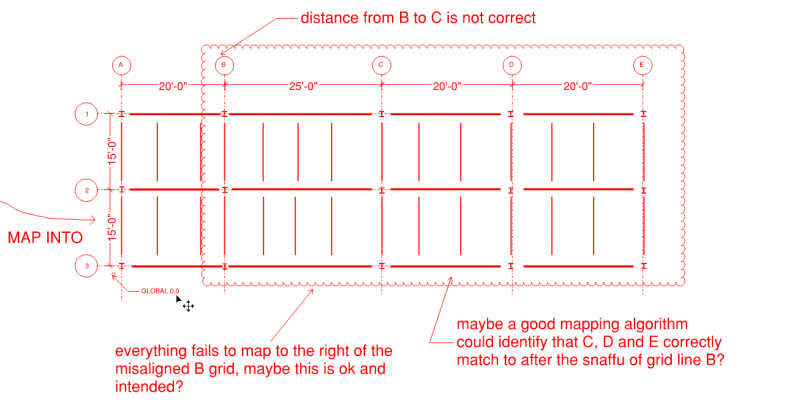
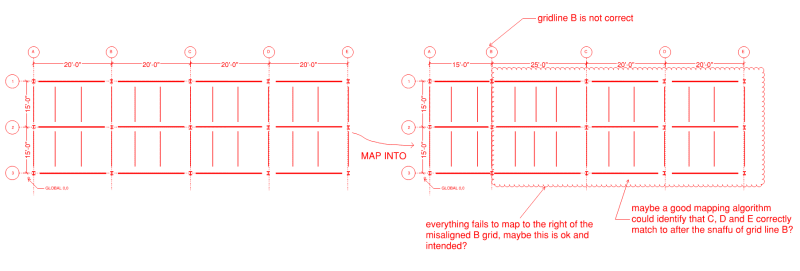
Also, if one of the gridlines gets significantly off (say 3'-0" or more), the sloppy mapping algorithm falls apart and flags all other elements as being out of sync. Maybe a good mapping algorithm could tackle this, flagging the offending bay, and then mapping correctly the remaining bays beyond?
Anyways, the end goal is to map beam and columns from one piece of software to another, with a robust mapping algorithm.
I am fine with sticking with 2d if need be, but the end goal would like be a full 3d solution. Assume that all grid line locations are known between the two pieces of software and all beam/column coordinates are known.
Are there any famous algorithms for mapping points between one "system" to another "system"
The problem:
Often our revit models and engineering models are located at differing points in global space and maybe even rotated. I want to be to map the two models together with some form of a tolerance.
See image below:
I have written some sloppy code previously to tackle this problem, but it requires manual input for mapping the global coordinates between the two programs and could not handle a rotation type parameter.
Also, if one of the gridlines gets significantly off (say 3'-0" or more), the sloppy mapping algorithm falls apart and flags all other elements as being out of sync. Maybe a good mapping algorithm could tackle this, flagging the offending bay, and then mapping correctly the remaining bays beyond?
Anyways, the end goal is to map beam and columns from one piece of software to another, with a robust mapping algorithm.
I am fine with sticking with 2d if need be, but the end goal would like be a full 3d solution. Assume that all grid line locations are known between the two pieces of software and all beam/column coordinates are known.
Are there any famous algorithms for mapping points between one "system" to another "system"