Hello,
Im having a problem, cannot run dynamic analysis of my model.
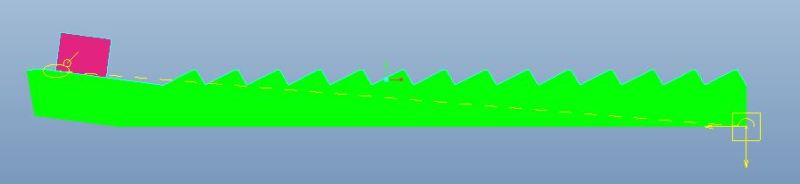
I need to simulate the rotation of the rectangle (purple) along the toothed plate (green).
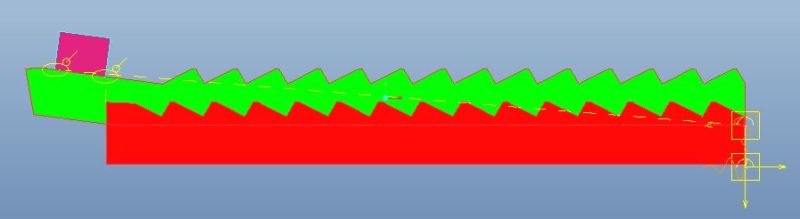
The final idea is to have another toothed plate which will have a rectangluar movement around the first plate. (up, forward, down, backwards). Toots of the red plate goes above the green plate, grab the rectangle and move it forward. The red plate with the rectangle goes down, leaving the rectangle on the green plate. Red plate goes backward, in the start position for the next cycle.
All materials are steel. Gravity is set.
Now my question.
Which kind of connection do I use to define this mechanisam.
I tryed to define planar movement between rectangle and plate and additional cam follower (cam1-tooths, cam2-surfaces of the rectangle).
Liftoff is on and the factor is set to zero.
I put the rectangle above the plate and run the simulation. No additional servo/force motors are active, only gravity. At the moment I simulate with only the green plate. Hope to get the rectangle to fall and slide to the first tooth.
When I run the simulation the first try least till contact of the rectangle and the plate and every other try breaks immediately (dynamic analysis failed).
Im not having a clue what could be the problem.
Please help.
Im having a problem, cannot run dynamic analysis of my model.
I need to simulate the rotation of the rectangle (purple) along the toothed plate (green).
The final idea is to have another toothed plate which will have a rectangluar movement around the first plate. (up, forward, down, backwards). Toots of the red plate goes above the green plate, grab the rectangle and move it forward. The red plate with the rectangle goes down, leaving the rectangle on the green plate. Red plate goes backward, in the start position for the next cycle.
All materials are steel. Gravity is set.
Now my question.
Which kind of connection do I use to define this mechanisam.
I tryed to define planar movement between rectangle and plate and additional cam follower (cam1-tooths, cam2-surfaces of the rectangle).
Liftoff is on and the factor is set to zero.
I put the rectangle above the plate and run the simulation. No additional servo/force motors are active, only gravity. At the moment I simulate with only the green plate. Hope to get the rectangle to fall and slide to the first tooth.
When I run the simulation the first try least till contact of the rectangle and the plate and every other try breaks immediately (dynamic analysis failed).
Im not having a clue what could be the problem.
Please help.